
MRMS history
- System based on Arduino central MCU and Raspberry Pi MPU.
- Same code for both variants.
- VS Code and C++.
- A few dozens of electronic boards: voltage regulators, sensors, motor controllers, etc.
- CAN Bus.
- Robots took part in many world championhips and other competitions.
V-MRMS Hardware
- CAN Bus linked modules.
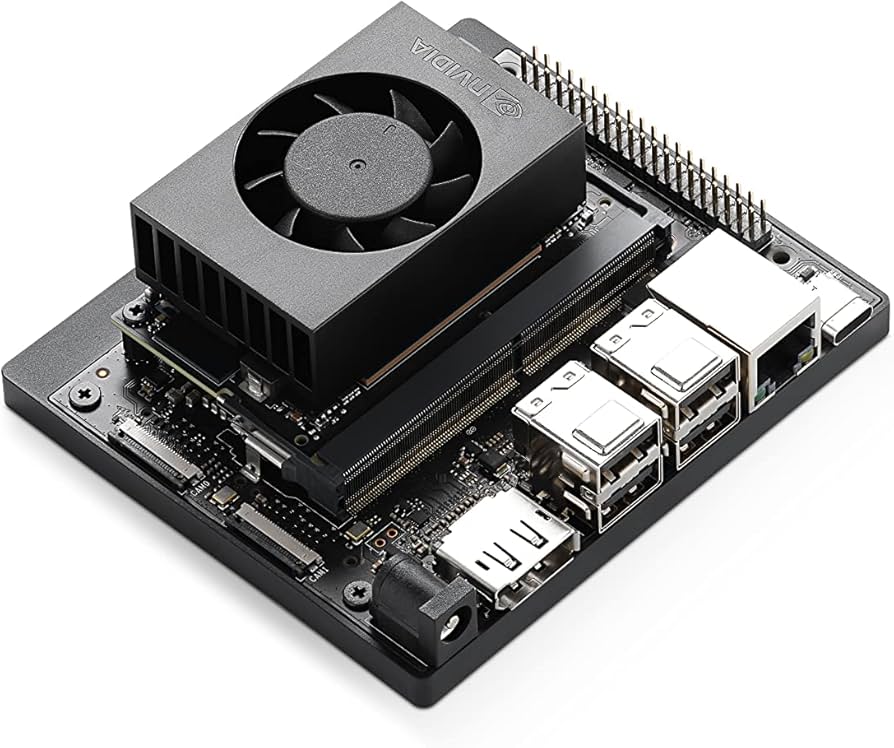
- NVIDIA Orin Jetson Nano, GPU – AI and fast processing.
- SPI – CAN Bus bridge.
- All MRMS boards work in V-MRMS.
- 3D printed elements.
- NVIDIA software package.
- VS Code and C++.
NVIDIA PC
- PC with NVIDIA graphic card.
- Isaac Sim
- VS Code and Python
Digital Twins
F1, jet engines have digital twins.
NVIDIA Isaac Sim
Robotic simulator.
Realistic copy of real world.
Programming of robots in a virtual copy and then use the same program in a real environment.
Reinforced Learning
Use Case

Current Task
Importing of robot from Autodesk Fusion 360 into Isaac Sim.
Generating objects in Fusion 360, like buildings, streets, different object in a city and importing them all into Isaac Sim.
Adjusting the virtual objects to mimic precisely real world behavior.
Developing a sample program for the robot to do some tasks in the city.
Trying the real robot with the same program.